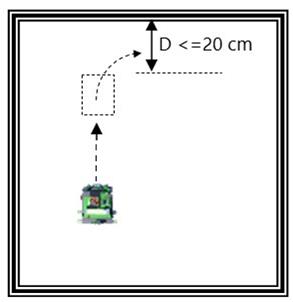
Program a robot to move forward at 60% of the
full speed in WORLD_1. The robot turns right if detects the obstacles in front
is 20 cm away.
Flowchart:
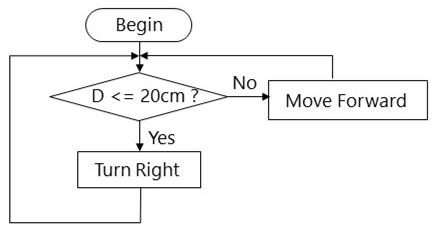
Problem
analysis:
The robot has
two actions – Moving forward and Turning right. Therefore, two statements need
to be added:
v 1st statement: The robot will
make a right turn if the front ultrasonic sensor reading is less than 20 cm (it
has sensed the front obstacle is less than 20 cm away)
v 2nd statement: The robot
moves forward if the 1st statement is not executed.
Procedure:
We will write the program code based on the
example 9.2.
1.
In the “Practice” panel, click on “AI” to launch the AI programming
panel.

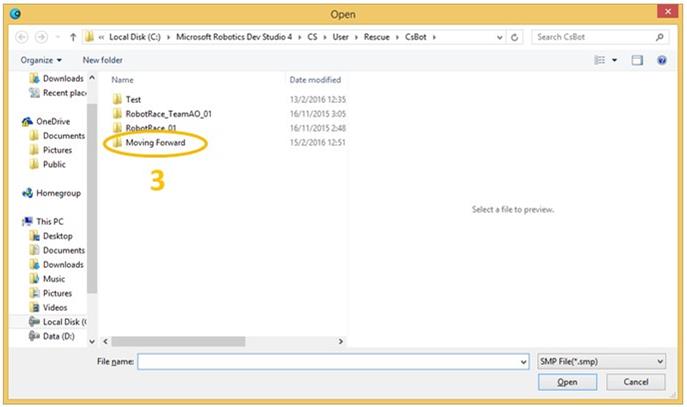
2.
Open the “Moving Forward” project.

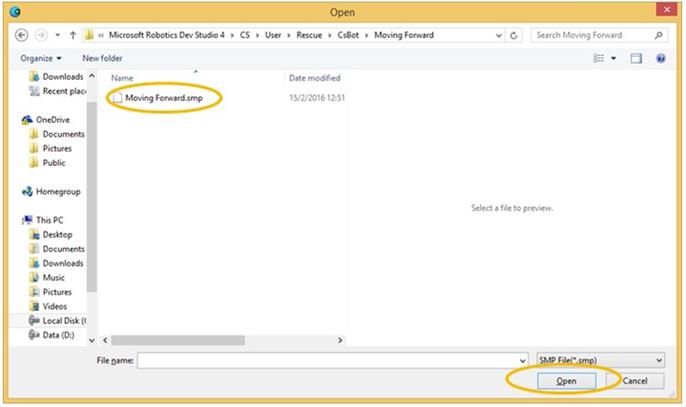
3.
Choose the “Moving Forward.smp”.
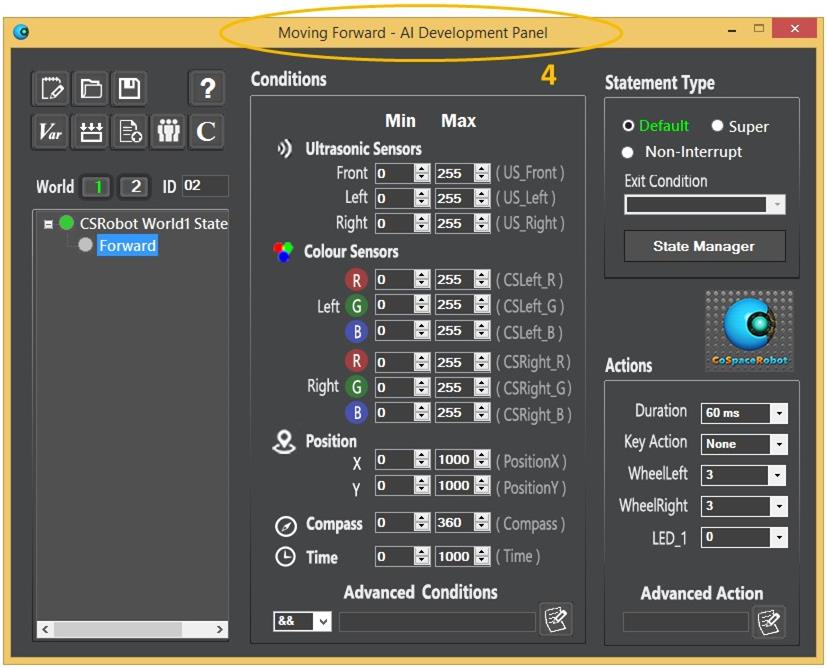
4.
The Moving Forward project is loaded.
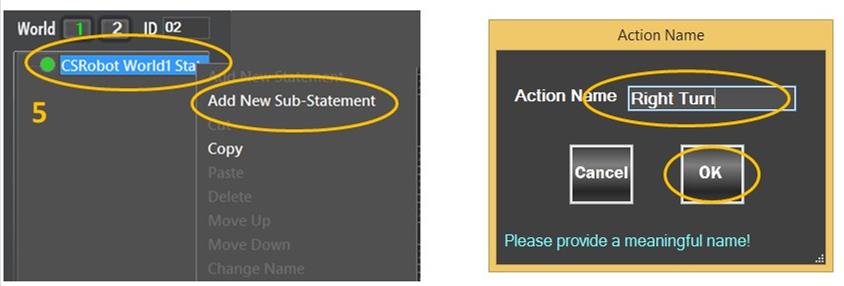
5.
Add a new statement - “Right Turn”.
The robot needs to check whether it is
approaching to the front obstacles using the front ultrasonic sensor. It only
moves forward if there is no obstacle detected within 20cm in front. Hence, the
“Right Turn” statement has the higher priority than the “Moving Forward”. We
should put the “Right Turn” as the first statement.
6.
The “Right Turn” is now added. It is before the “Moving Forward”. If you
accidentally add the “Right Turn” below the “Moving Forward” statement, move it
up (Refer to 8.2.2).

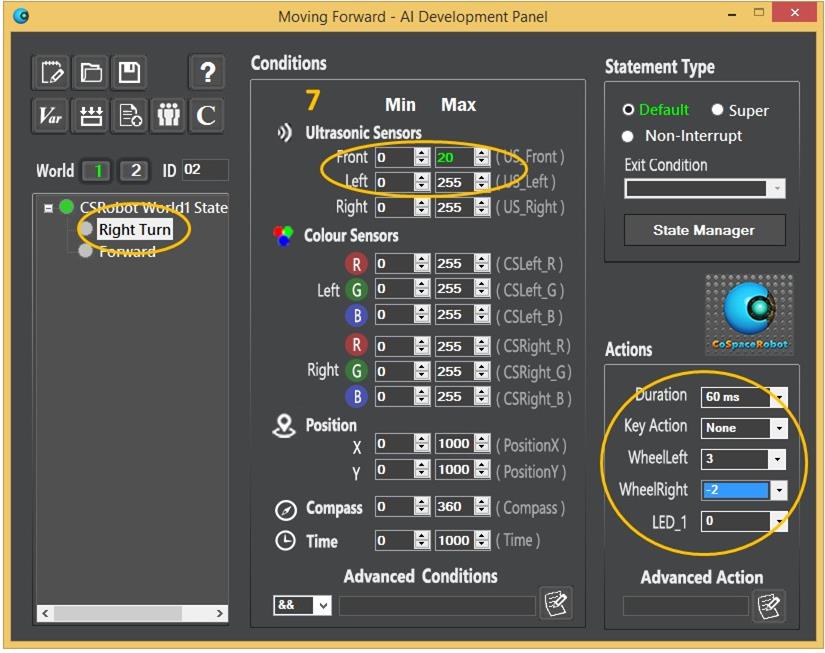
7.
Assign conditions and actions to the “Right Turn” statement.
When US_Front < 20, robot turns right. (WheelRight = +3, WheelLeft = -2. Duration =
60 ms, LED_1 = 0 )
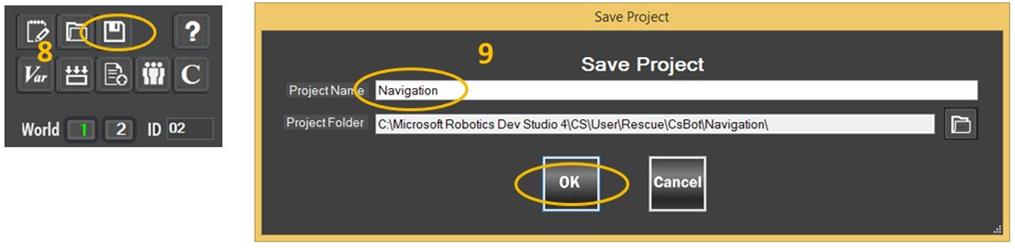
8.
Save project.
9.
You should change the project name as “Navigation”.
10. Build the project. Load the “Navigation.dll”
to the RED robot and monitor the performance.