Fig. 7-6 shows
the real-time sensors feedback segment. It allows users to monitor the
real-time sensors value when the selected virtual robot navigates through the
3D virtual environment.
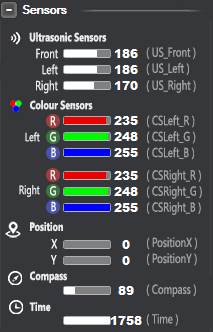
Fig. 7-6:
Real-time sensor feedback
|
Symbol |
Sensor |
It shows … |
|
US_Front |
Front Ultrasonic distance sensor |
The distance between obstacles and the sensor. Range: 0 – 255 cm |
|
US_Left |
Left Ultrasonic distance sensor |
The distance between obstacles and the sensor. Range: 0 – 255 cm |
|
US_Right |
Right Ultrasonic distance sensor |
The distance between obstacles and the sensor. Range: 0 – 255 cm |
|
CSLeft_R |
Left RGB colour sensor |
The red channel value. Range: 0 - 255 |
|
CSLeft_G |
The green channel value. Range: 0 - 255 |
|
|
CSLeft_B |
The blue channel value. Range: 0 - 255 |
|
|
CSRight_R |
Right RGB colour sensor |
The red channel value. Range: 0 - 255 |
|
CSRight_G |
The green channel value. Range: 0 - 255 |
|
|
CSRight_B |
The blue channel value. Range: 0 - 255 |
|
|
PositionX |
Robot current position (only available in WORLD_2) |
X coordinate |
|
PositionY |
Y coordinate |
|
|
Compass |
Compass sensor |
It is 0o when facing score board. Range 0 – 360o |
|
Time |
Clock |
The clock runs when game starts |