The
following basic actions can be defined in the graphical programming interface.
v Duration – execution time of the action
v Key Action – pre-defined special actions
v WheelLeft – Rotational speed of the left
wheel
v WheelRight – Rotational speed of the right
wheel
v LED_1 – LED status
Fig. 8-24 shows the basic action panel.
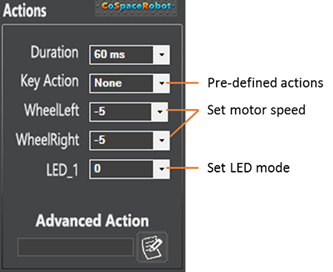
Fig. 8-24:
Actions
Duration
Duration is
used to specify the time that the action is executed continually. Within this
period, the robot’s action will not be interrupted by other statement, except the
Super action. The unit of duration is ms.
The minimum duration is 60ms.
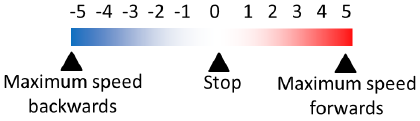
Define robot moving direction
The direction and speed of the two wheels can
be controlled independently. Each wheel can be set to a value between -5 and +5,
where +5 is maximum forward speed, -5 is maximum reverse speed and 0 is stop.
|
Movement |
Left
Wheel |
Right
Wheel |
|
Robot moves forward |
Positive Value, e.g. “+1” |
Positive Value |
|
Robot turns right |
Positive Value |
Negative Value, e.g. “- 1” |
|
Robot turns left |
Negative Value |
Positive Value |
|
Robot moves backwards |
Negative Value |
Negative Value |
Define robot moving speed
|
Speed
Setting |
Motor
Speed |
|
0 |
Stop |
|
1 |
20% of its full speed |
|
2 |
40% of its full speed |
|
3 |
60% of its full speed |
|
4 |
80% of its full speed |
|
5 |
full speed |
Set LED display
The LEDs
can be set by setting the LED value to different values:
|
LED
Setting |
What it
means… |
|
0 |
LED – off |
|
1 |
LED – blinks |
|
2 |
LED – steady display |
Key Action
For certain tasks, a key action must be
specified from the drop down menu:
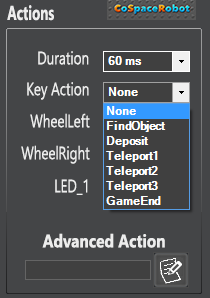
Fig. 8-25: Add a new state
|
Key
Action |
What it
means… |
|
FindObject |
The action is needed when an object is found. When the
“FindObject” key action is executed, the internal variable associated with
the “LoadedObjects”, the loaded objects counter, will be added by 1. The robot will move forward at wheel speed
of “+2” for 6x64ms at the end of the
action. |
|
Deposit |
The action is needed when a robot deposits the objects. When the
“Deposit” key action is executed, “LoadedObjects” will be reset to 0. This
helps to clear the loaded object counter. The robot can continue to pick up
objects after deposit. |
|
Teleport1 |
The action is needed when teleporting. When the “Teleport1” key action is executed, the WORLD_2 will be used.
The robot will be sent to the 1st teleporting location. The loaded
object counter, LoadObjects, will be set to 0. The robot will be set
stationary. LED will be off. “Teleport2” or “Teleport3” means the robot will be teleported to the 2nd
or 3rd teleporting location.
|
|
GameEnd |
Not in use. |
More examples:
Action |
How to
program… |
|
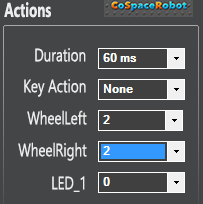
Robot moves forward with 40% of the full speed for 60 ms |
|
|
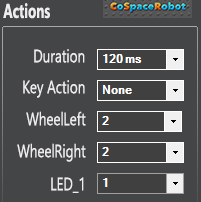
Robot moves forward with 40% of the full speed for 120 ms while LED is
flashing. |
|
|
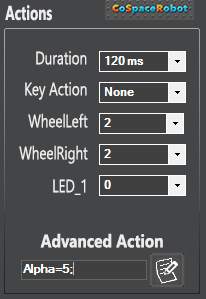
Robot moves forward with 40% of the full speed for 120 ms. At mean
time. The internal variable “Alpha” is set to 5. |
Use advanced action.
|