Program a robot to pick up the RED objects in
the virtual world. It will stop collecting if the robot has collected 6
objects. It means the robot will not even stop and blinks LED when it detects
the RED object after collecting 6 objects.
Analysis:
There are
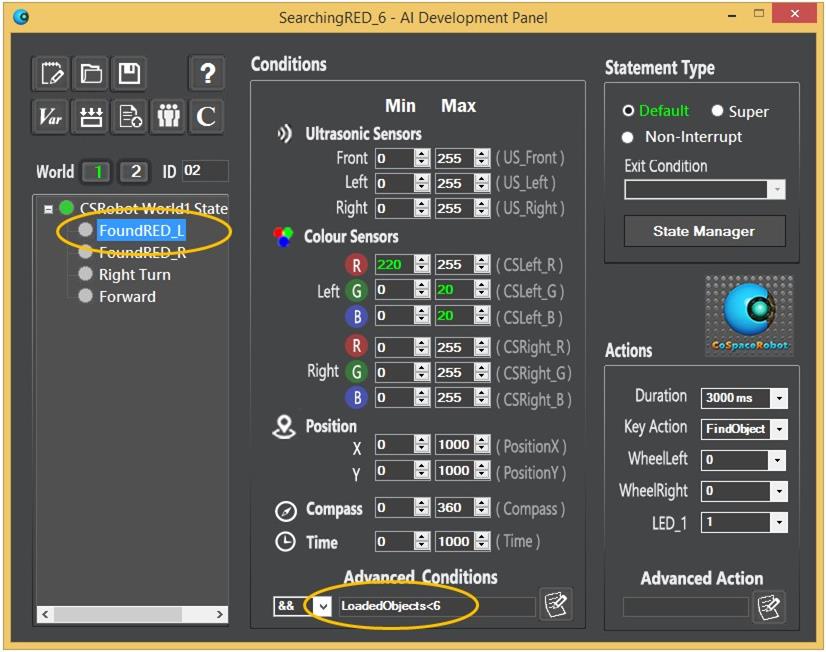
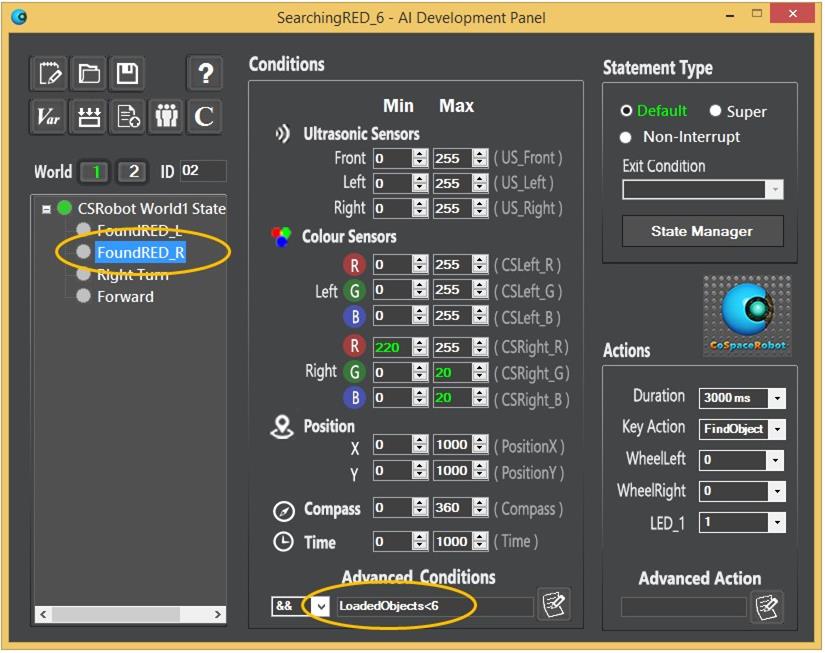
many pre-defined internal variables can be used for programming. One of these
is the “LoadedObjects”. It is the object counter. It counts the object
collected. When the key action “FindObject” is executed, the “LoadedObjects” is
increased by 1.
We can
access the “LoadedObjects” variable in the program to block robot from
collecting objects once LoadedObjects = 6.
Procedure:
1.
Open the project “SearchingRED”.
2.
Include the “LoadedObjects<6” in the advanced condition. This means
that the robot will only stops and flashes its LED when the robot detects the
RED object if the LoadedObjects <6.
3.
Save the project as “SearchingRED_6”.
4.
Build the project.
5.
Load the “SearchingRED_6.dll” to the RED robot and monitor its
performance.